Optional 💽
🖱️Right-click and select “Save link as” to download the exercise HERE 👈 so you can work on it locally on your computer
Hint
Imports¶
import numpy as np
# Problem definition
from probeye.definition.inverse_problem import InverseProblem
from probeye.definition.forward_model import ForwardModelBase
from probeye.definition.distribution import Normal
from probeye.definition.sensor import Sensor
from probeye.definition.likelihood_model import GaussianLikelihoodModel
from probeye.definition.correlation_model import ExpModel
# Inference
from probeye.inference.dynesty.solver import DynestySolverProblem setup¶
# Fixed parameters
I = 1e9 # mm^4
L = 10_000 # mm
Q_loc = 2500 # mm
# Measurements
x_sensors = [2500, 5000] # mm (always from lower to higher, bug in inv_cov_vec_1D in tripy)
d_sensors = [35, 50] # mm
sigma_model = 2.5 # mm
pearson = 0.5
l_corr = -np.abs(x_sensors[1] - x_sensors[0]) / np.log(pearson) # mm (assuming exponential correlation)
# Prior
E_mean = 60 # GPa
E_std = 20 # GPa
Q_mean = 60 # kN
Q_std = 30 # kNDefine forward model¶
def beam_deflection(E, Q, a, x): # a is load position, x is sensor position
if x < a:
b = L - a
return Q * b * x * (L ** 2 - b ** 2 - x ** 2) / (6 * E * I * L)
return Q * a * (L - x) * (2 * L * x - x ** 2 - a ** 2) / (6 * E * I * L)## Write your code where the three dots are
class BeamModel(ForwardModelBase):
def interface(self):
...
def response(self, inp: dict) -> dict:
...Define inverse problem¶
## Write your code where the three dots are
# Instantiate the inverse problem
problem = InverseProblem("Beam model with two sensors", print_header=False)
...Solve with Dynesty¶
dynesty_solver = DynestySolver(problem, show_progress=True)
inference_data = dynesty_solver.run(estimation_method='static', nlive=250)Model comparison¶
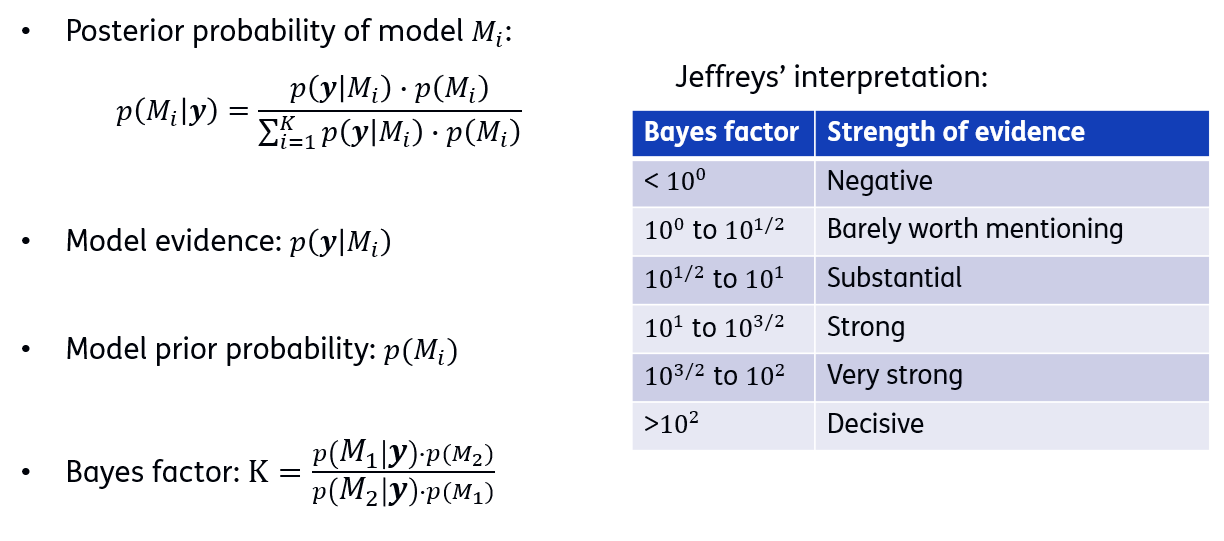
## Write your code where the three dots are
log_evidence_1 = ... # See value in previous notebook
log_evidence_2 = ... # See value in this notebook
prior_M_1 = ...
prior_M_2 = ...
denominator = ...
posterior_M_1 = ...
posterior_M_2 = ...
print(f"Posterior probability model 1: {posterior_M_1}")
print(f"Posterior probability model 2: {posterior_M_2}")
bayes_factor = ...
print(f"Bayes factor: {bayes_factor}")Complete Code! 📃💻
Here’s the complete code that you would run in your PC:
import numpy as np
# Problem definition
from probeye.definition.inverse_problem import InverseProblem
from probeye.definition.forward_model import ForwardModelBase
from probeye.definition.distribution import Normal
from probeye.definition.sensor import Sensor
from probeye.definition.likelihood_model import GaussianLikelihoodModel
from probeye.definition.correlation_model import ExpModel
# Inference
from probeye.inference.dynesty.solver import DynestySolver
# Fixed parameters
I = 1e9 # mm^4
L = 10_000 # mm
Q_loc = 2500 # mm
# Measurements
x_sensors = [2500, 5000] # mm (always from lower to higher, bug in inv_cov_vec_1D in tripy)
d_sensors = [35, 50] # mm
sigma_model = 2.5 # mm
pearson = 0.5
l_corr = -np.abs(x_sensors[1] - x_sensors[0]) / np.log(pearson) # mm (assuming exponential correlation)
# Prior
E_mean = 60 # GPa
E_std = 20 # GPa
Q_mean = 60 # kN
Q_std = 30 # kN
#Forward model
def beam_deflection(E, Q, a, x): # a is load position, x is sensor position
if x < a:
b = L - a
return Q * b * x * (L ** 2 - b ** 2 - x ** 2) / (6 * E * I * L)
return Q * a * (L - x) * (2 * L * x - x ** 2 - a ** 2) / (6 * E * I * L)
class BeamModel(ForwardModelBase):
def interface(self):
self.parameters = ["E", "Q"]
self.input_sensors = Sensor("x")
self.output_sensors = Sensor("y", std_model="sigma")
def response(self, inp: dict) -> dict:
E = inp["E"]
Q = inp["Q"]
a = Q_loc
x = inp["x"]
return {"y": [beam_deflection(E, Q, a, float(x[0])), beam_deflection(E, Q, a, float(x[1]))]} # float() needed, probably a bug in probeye
# Instantiate the inverse problem
problem = InverseProblem("Beam model with two sensors", print_header=False)
# Add latent parameters
problem.add_parameter(
"E",
tex="$E$",
info="Elastic modulus of the beam (GPa)",
prior=Normal(mean=E_mean, std=E_std),
)
problem.add_parameter(
"Q",
tex="$Q$",
info="Load applied to the beam (kN)",
prior=Normal(mean=Q_mean, std=Q_std),
)
# Add fixed parameters
problem.add_parameter(
"sigma",
tex="$\sigma$",
info="Standard deviation of the model error (mm)",
value=sigma_model,
)
problem.add_parameter(
"l_corr",
tex="$l_{corr}$",
info="Correlation length of the model error (mm)",
value=l_corr,
)
# Add measurement data
problem.add_experiment(
name="TestSeries_1",
sensor_data={"x": x_sensors, "y": d_sensors}
)
# Add forward model
problem.add_forward_model(BeamModel("BeamModel"), experiments="TestSeries_1")
# Add likelihood model
likelihood_model = GaussianLikelihoodModel(
experiment_name="TestSeries_1",
model_error="additive",
correlation=ExpModel(x="l_corr")
)
problem.add_likelihood_model(likelihood_model)
#Solve
dynesty_solver = DynestySolver(problem, show_progress=True)
inference_data = dynesty_solver.run(estimation_method='static', nlive=250)
#Model comparison
log_evidence_1 = -8.90
log_evidence_2 = -13.34
prior_M_1 = 0.5
prior_M_2 = 0.5
denominator = np.exp(log_evidence_1) * prior_M_1 + np.exp(log_evidence_2) * prior_M_2
posterior_M_1 = np.exp(log_evidence_1) * prior_M_1 / denominator
posterior_M_2 = np.exp(log_evidence_2) * prior_M_2 / denominator
print(f"Posterior probability model 1: {posterior_M_1}")
print(f"Posterior probability model 2: {posterior_M_2}")
bayes_factor = posterior_M_1 * prior_M_2 / (posterior_M_2 * prior_M_1)
print(f"Bayes factor: {bayes_factor}")