The heart of Bayesian inference is Bayes’ theorem, which takes this form for continuous variables:
or more intuitively:
Parameters (): The unknown system properties we want to identify
Measurements (): Noisy sensor data from the system
Prior : Parameter probabilities we assign before seeing data
Likelihood : Probability of observing the data given parameters
Posterior : Updated parameter knowledge after seeing data
Methods for Bayesian inference¶
Bayesian inference methods can be categorized based on their computational approach:
Exact methods: Conjugate priors provide analytical solutions when prior and posterior distributions belong to the same family
Exact methods (if run long enough): Numerical integration and sampling methods (MCMC, Nested sampling) that converge to exact solutions given sufficient computational time
Approximate methods: Variational inference and likelihood-free methods that provide fast approximations to the posterior
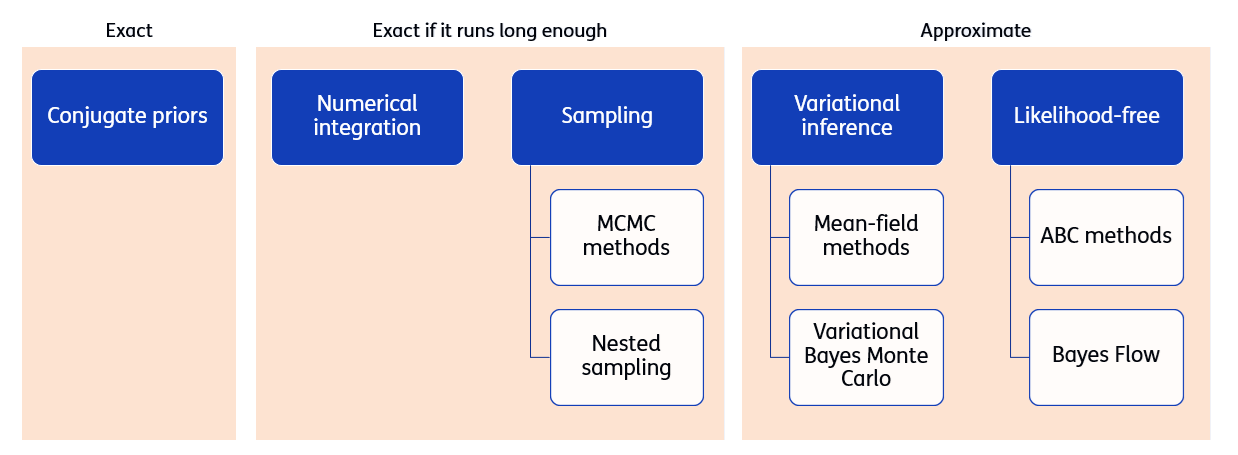
Note: Approximate methods are not covered in this crash course.
Applications¶
Some applications of Bayesian inference to structural engineering are:
Updating the resistance of a structure after passing a proof load test
Updating the reliability of a structure after it has survived a number of years
Updating the deterioration distribution on a structure after detecting corrosion in some areas
Updating the parameters of a finite element model after sensor data
The last application is known as system identification. Other names for it are Model updating and Model calibration.